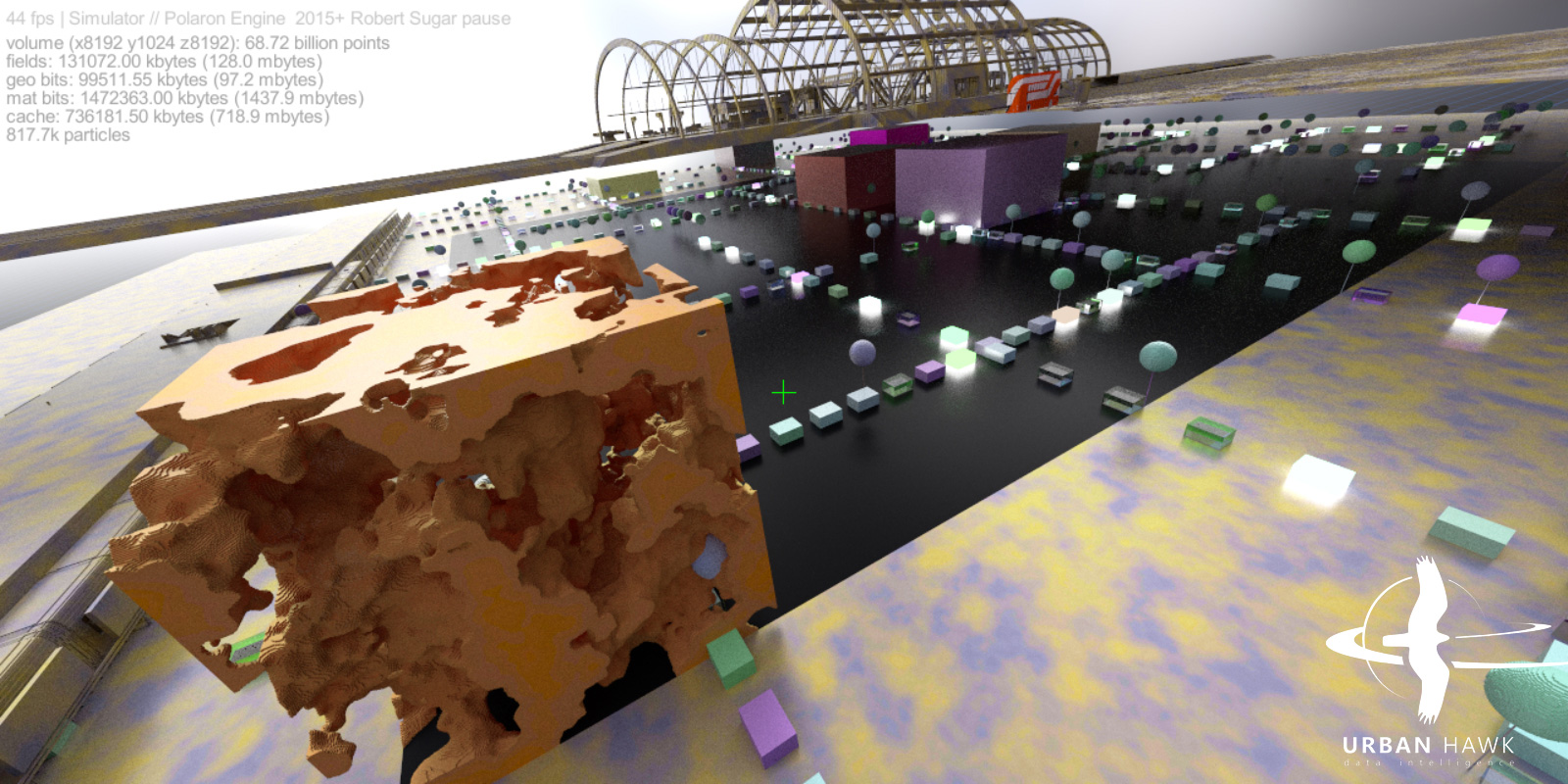
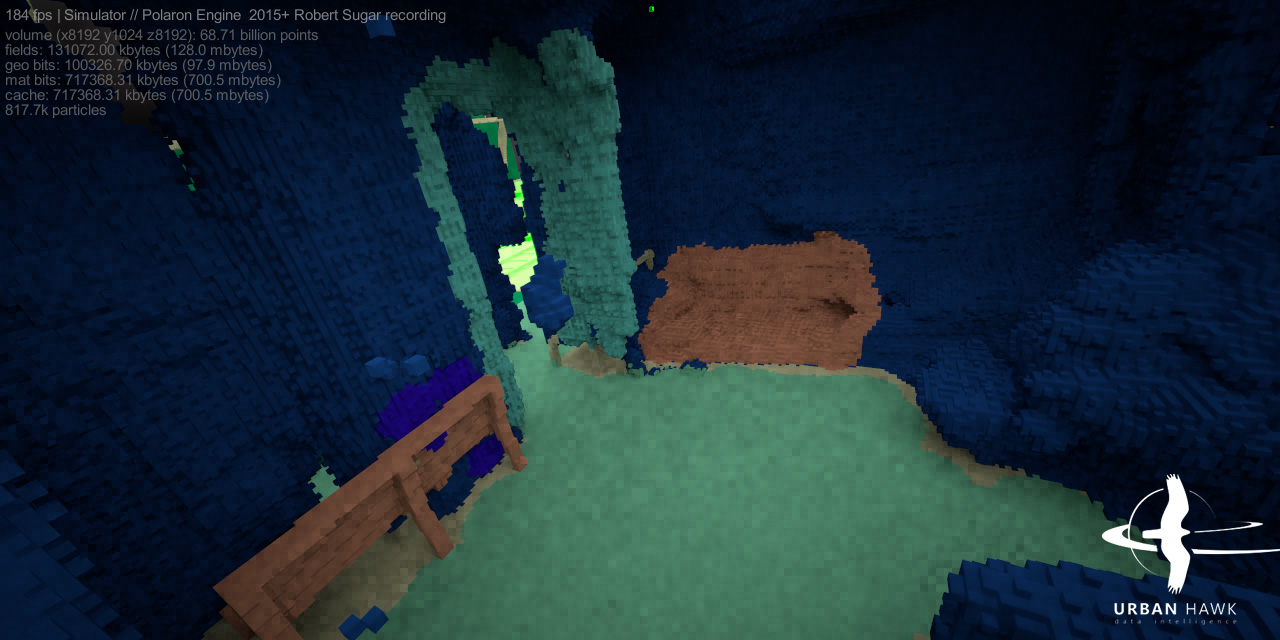
point cloud / voxel data
to situational awareness
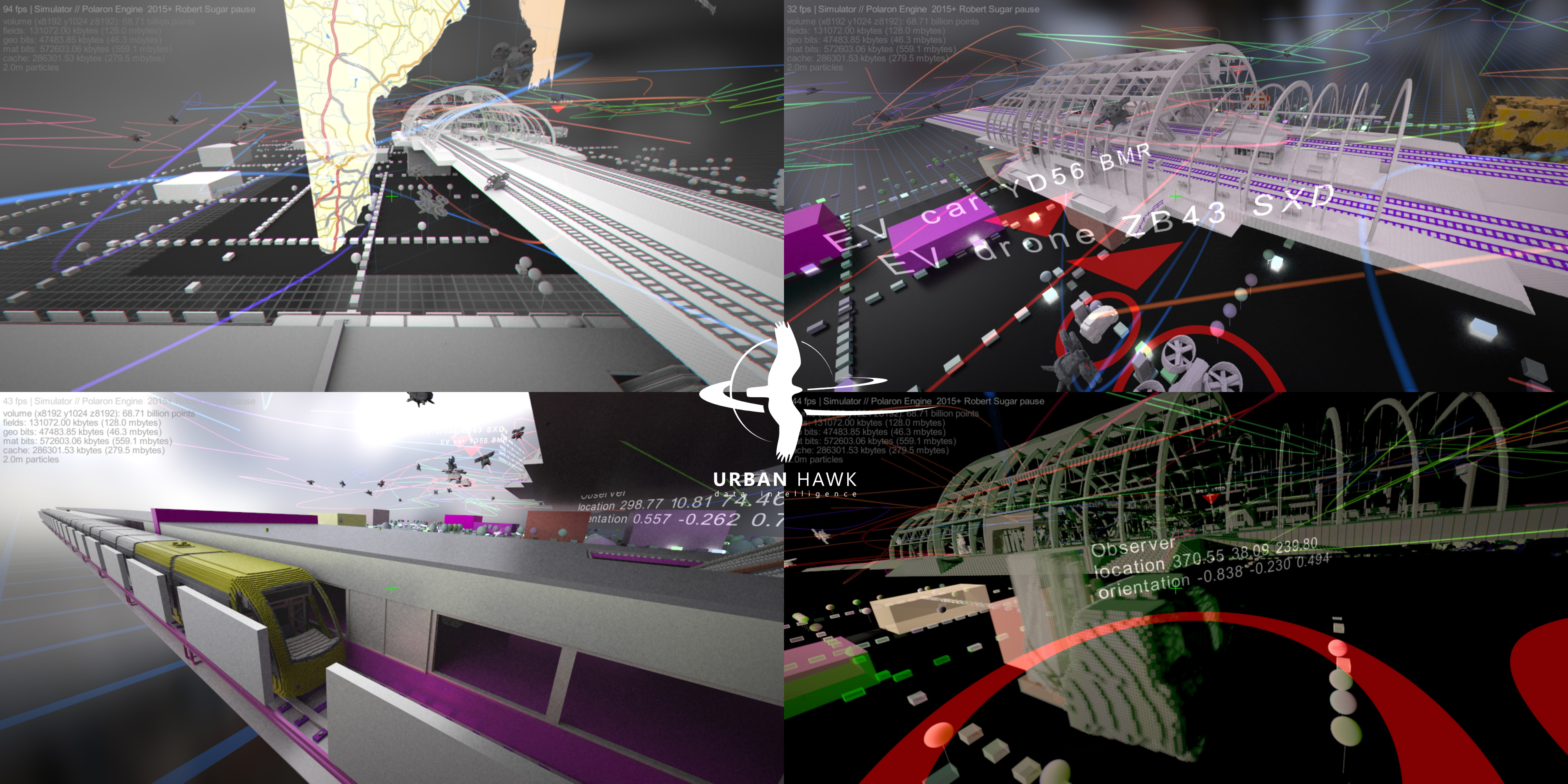
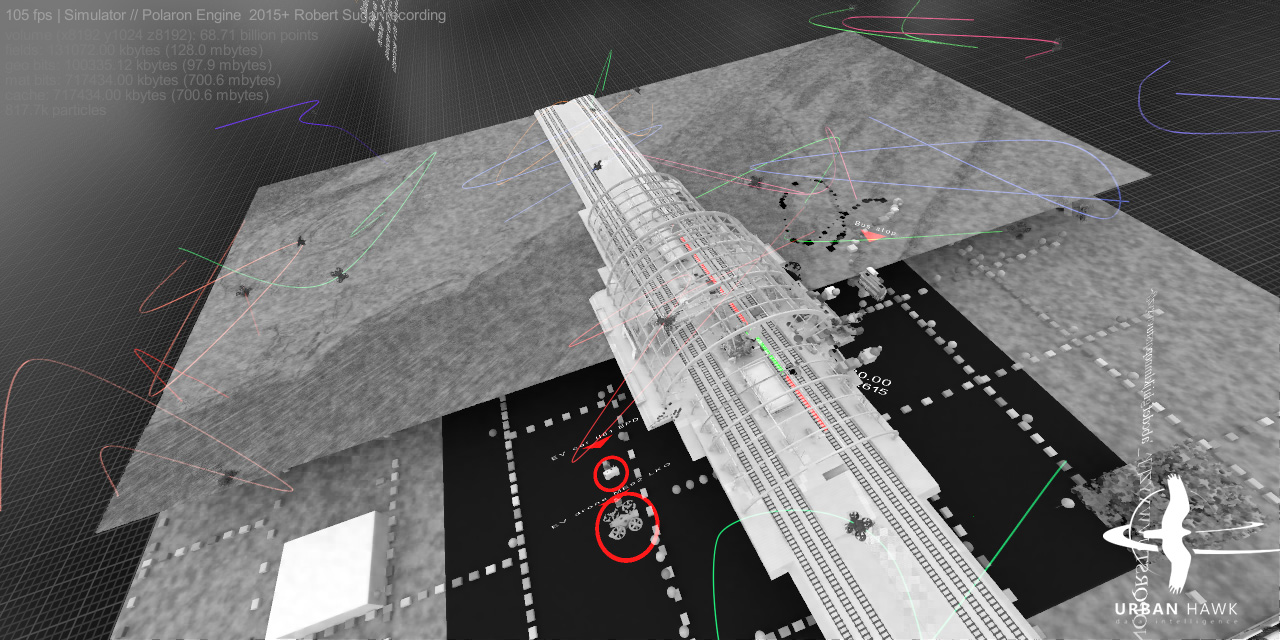
High-performance spatial data processing toolkit
Polaron copes with tera and peta byte scale spatial scenarios in real-time on GPU clusters.
Main features
Map
Capture the environment with Mono-Stereo camera or Lidar driven SLAM
Collate
Merge spatial and other relevant datasets together in voxel alike grids for fast processing
Artificial Intelligence
Automate feature detection with our AI trained on volumetric data
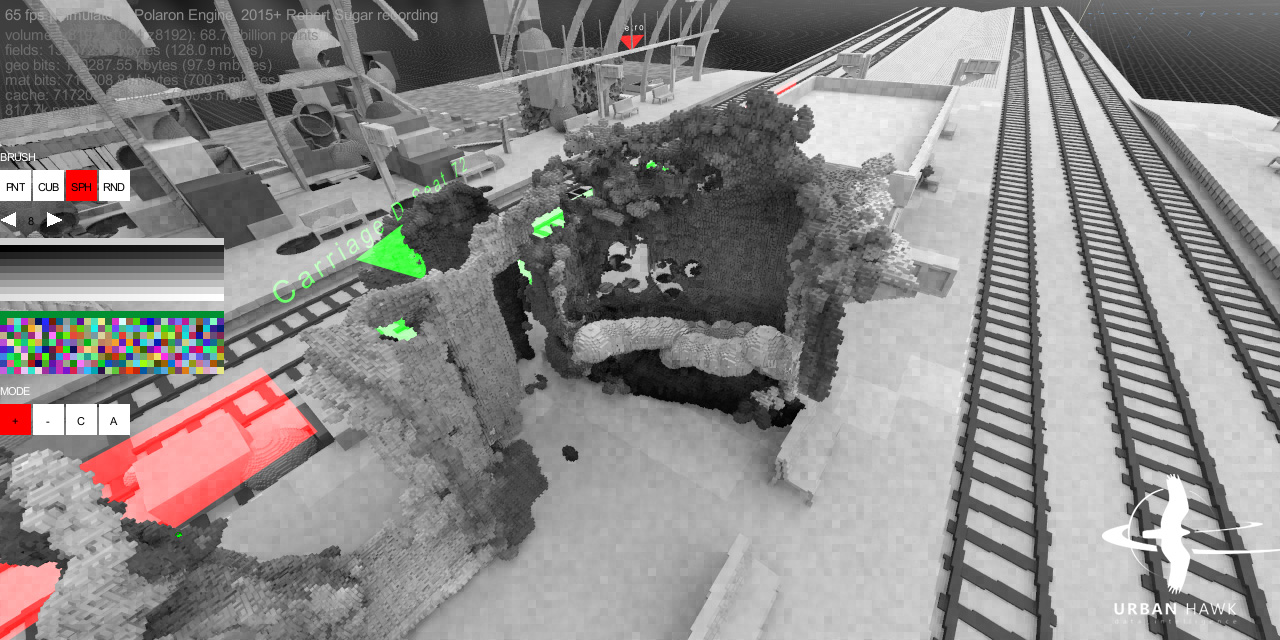
Annotate
Assign custom properties and per voxel
Edit
Use the inline editors to customise manually
Plan
Automate solution and route finding with multiple goals and factors considered
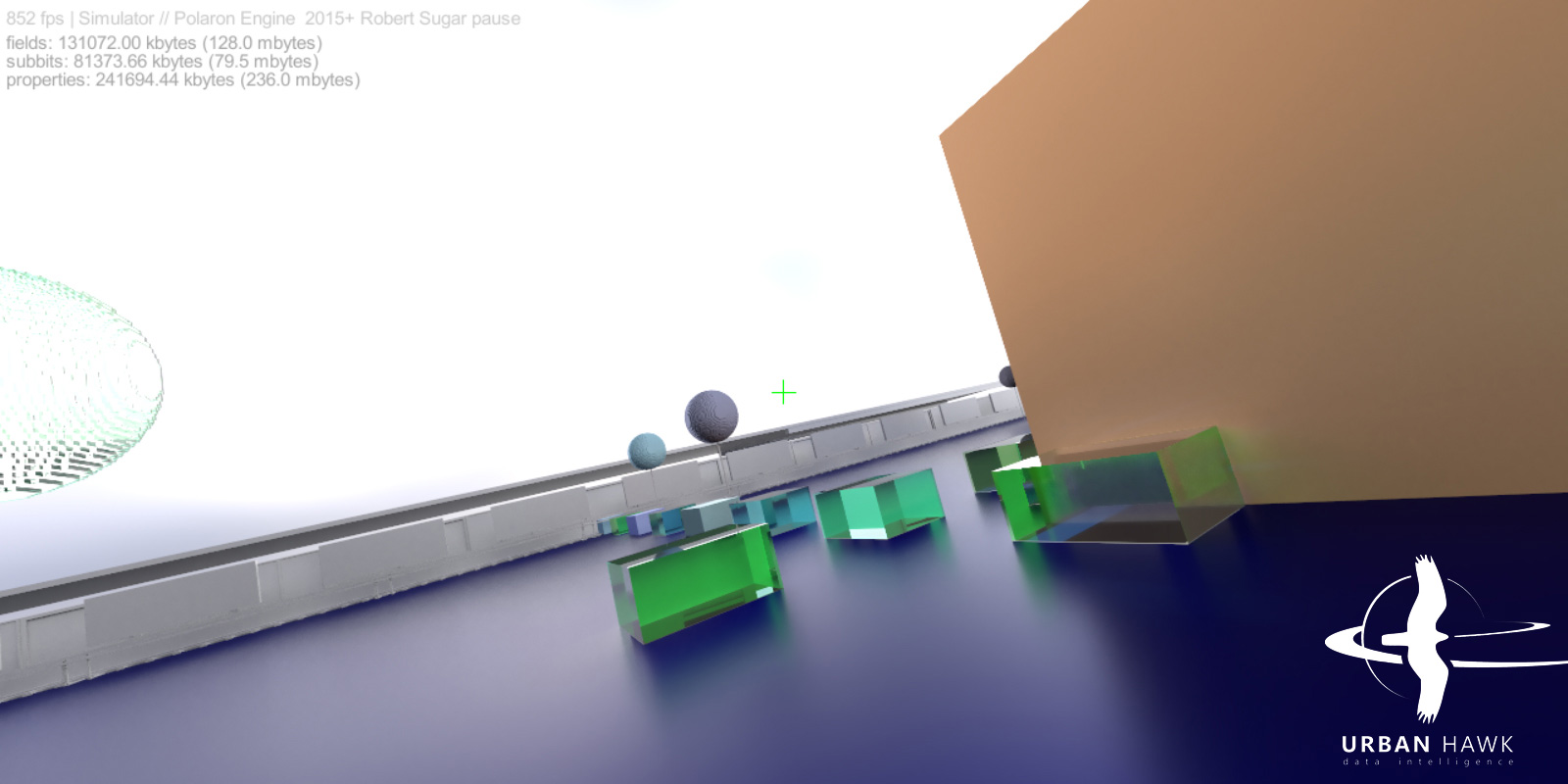
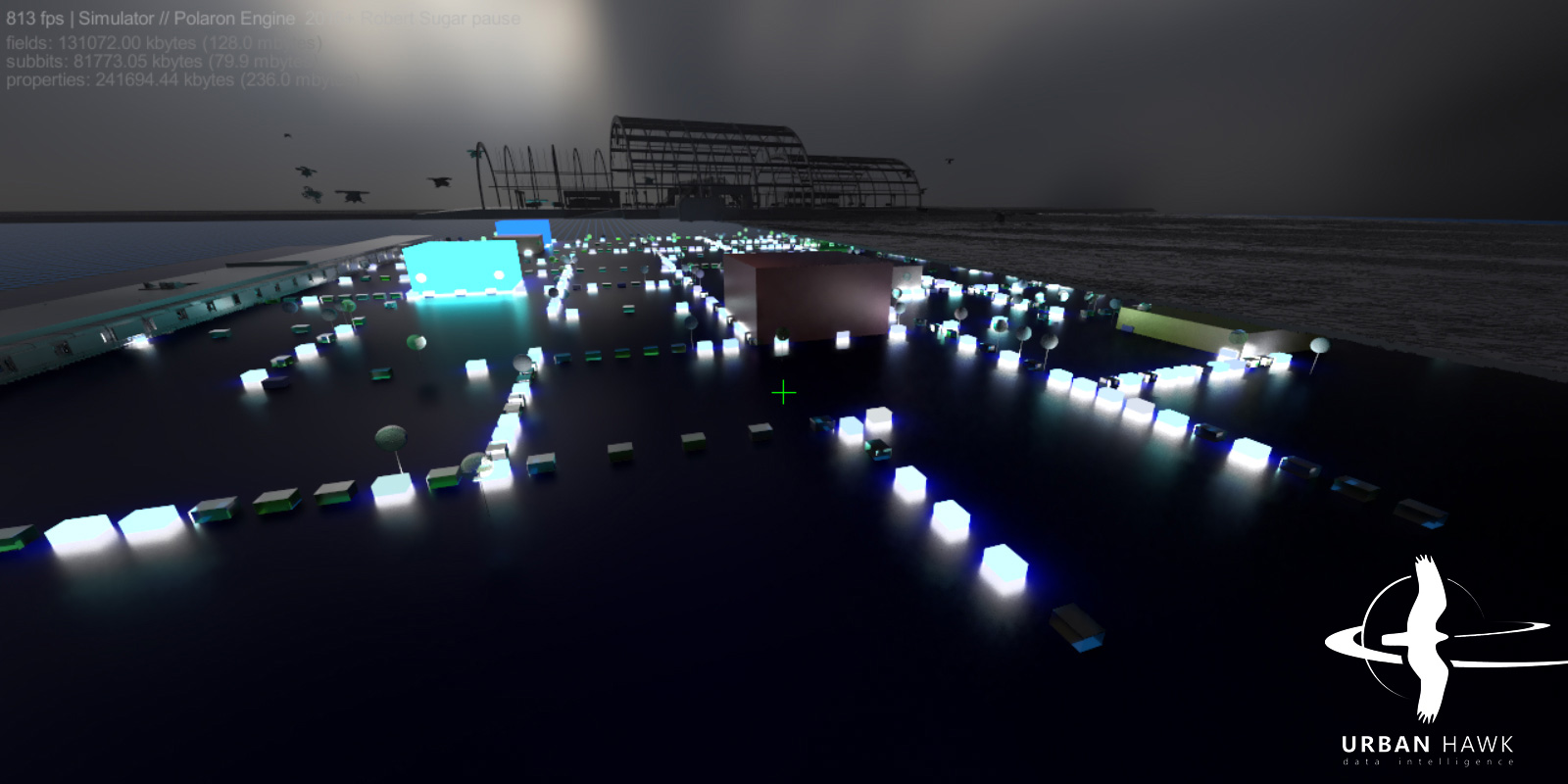
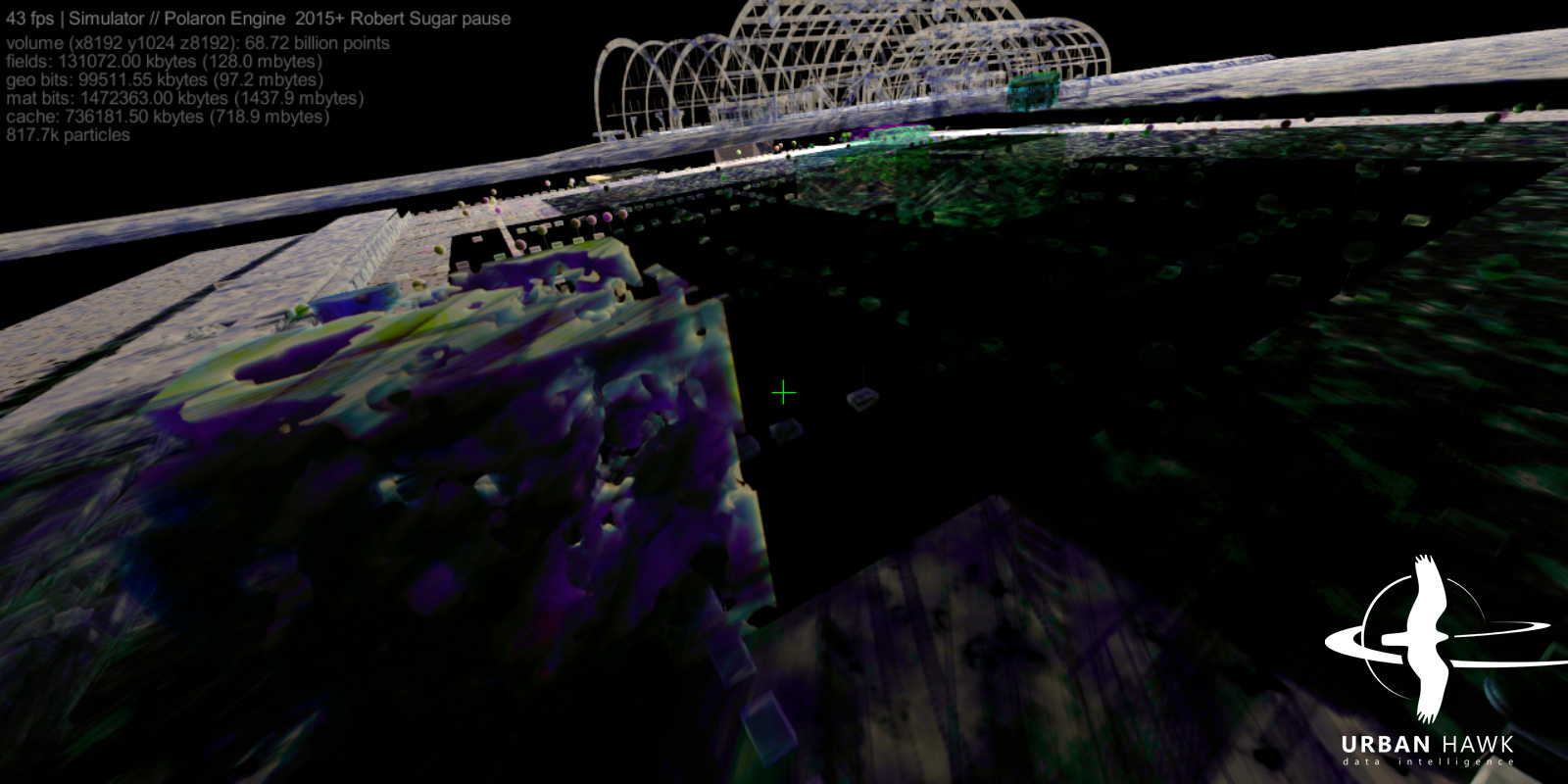
Visualise
Render with path traced progressive offline or spatio-temporal reprojected live modes; 3D UI
Integrate
Import from numerous data formats and export to traditional tools
Examples

Import from
point clouds
elevation maps
traditional 3D meshes
vector and shape files
SQL tables
JSON data streams
Export to
render streams (via internal path tracer)
point clouds
OBJ meshes (surfaces are reverse-polygonised)
JSON data streams

© 2024 Urban Hawk Limited. All rights reserved.
Copyright in this website (including, without limitation, text, images, videos, logos, icons, sounds recordings, software and source code) is owned or licensed by Urban Hawk Limited.
Copyright in material provided by agencies, private individuals or organisations may belong to those agencies, individuals or organisations and are being licensed by Urban Hawk Limited.
Urban Hawk Limited, a company incorporated and registered in Bristol, Somerset, United Kingdom.
Registered office - 15 Honeywick Close, Bristol, Somerset BS3 5ND, United Kingdom.
Registered number - 10615898.
Registered office - 15 Honeywick Close, Bristol, Somerset BS3 5ND, United Kingdom.
Registered number - 10615898.